W. Nicholas Greene

Hi! My name is Nick Greene and I’m a researcher and engineer in robotics, computer vision, and 3D perception. I’m currently working at a robotics startup in the Boston area.
I conducted my PhD studies in the Robust Robotics Group at the MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) under Professor Nicholas Roy. My thesis explored leveraging prior information for real-time monocular simultaneous localization and mapping (SLAM). I’m also very interested in augmented reality, variational methods, and deep learning.
Prior to joining CSAIL, I was an Assistant Technical Staff member in the Advanced Sensor Techniques Group at MIT Lincoln Laboratory where I developed state estimation algorithms for passive sonar applications. I earned my BSE in Electrical Engineering from Princeton University.
Recent
 | Leveraging Prior Information for Real-time Monocular Simultaneous Localization and Mapping W. Nicholas Greene PhD Thesis [ pdf ] |
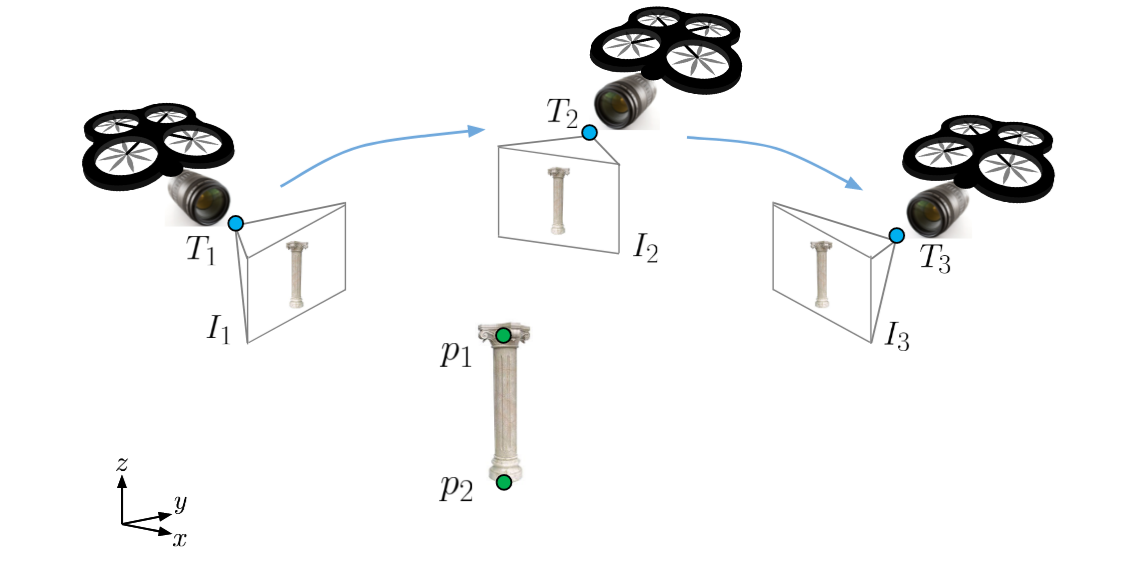
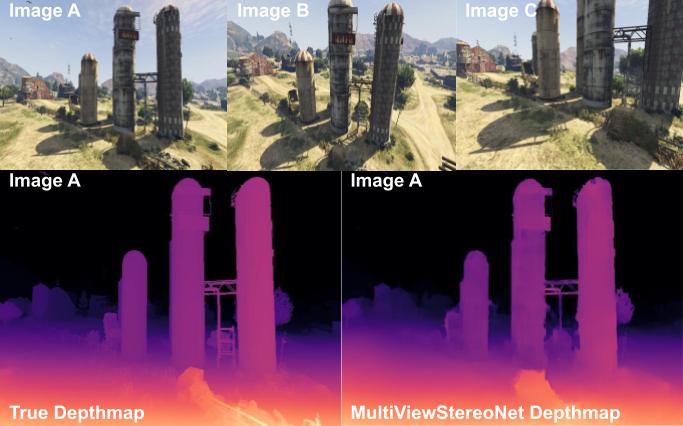 | MultiViewStereoNet: Fast Multi-View Stereo Depth Estimation using Incremental Viewpoint-Compensated Feature Extraction W. Nicholas Greene and Nicholas Roy ICRA 2021 [ pdf, video, code ] |
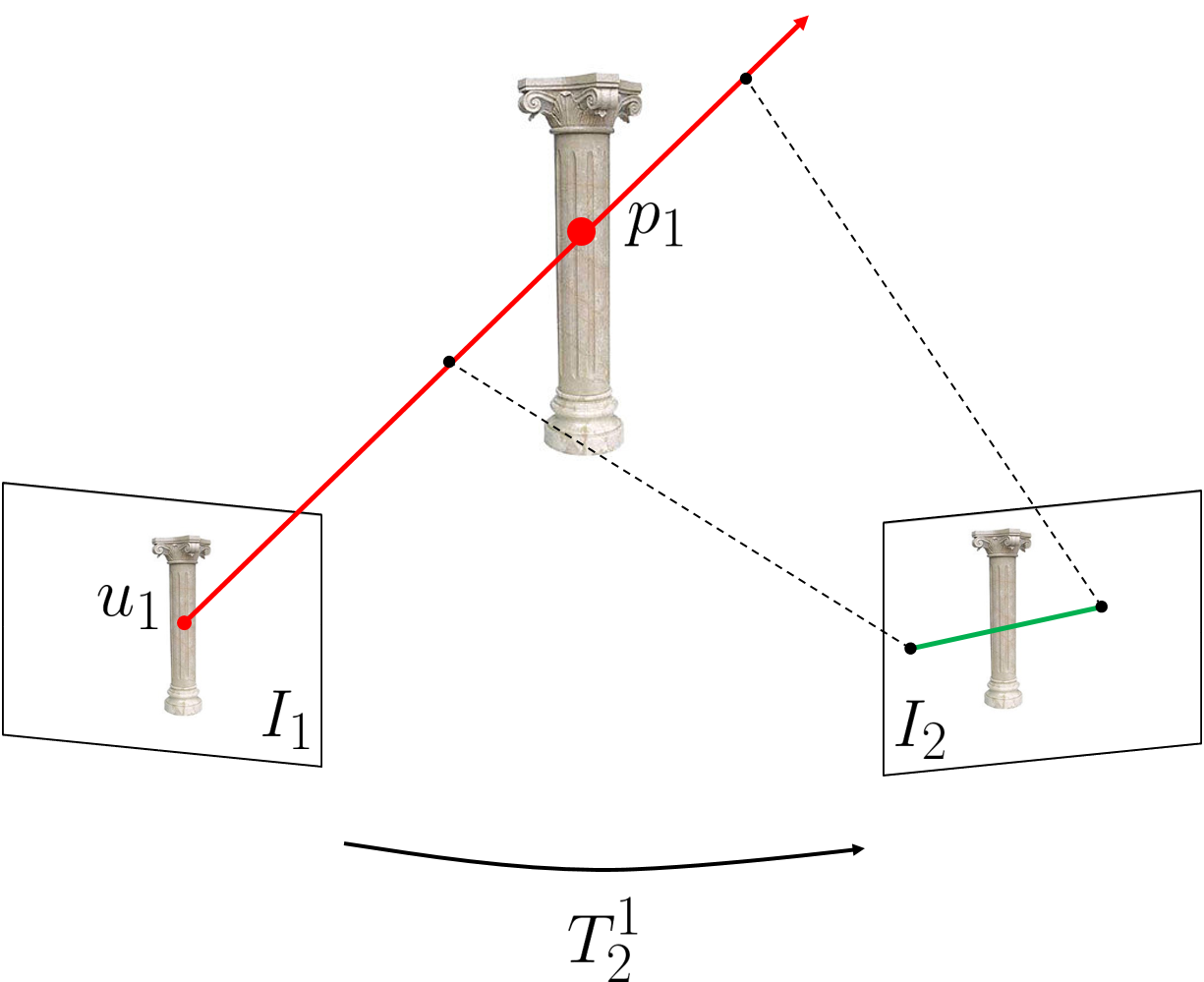
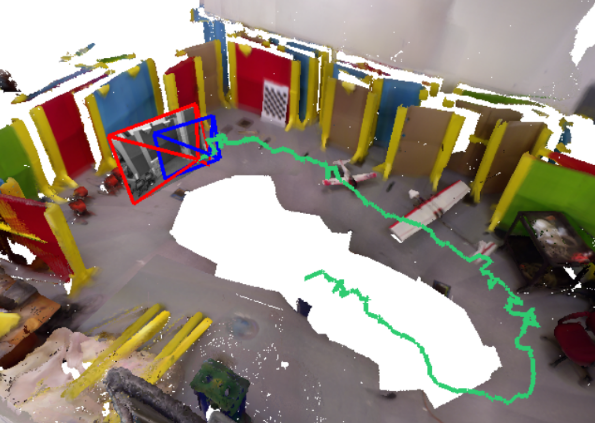
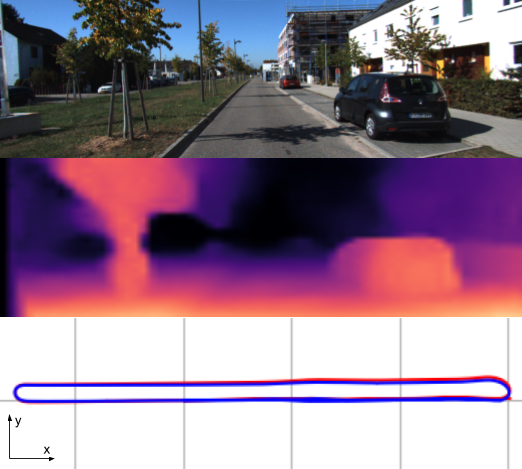 | Metrically-Scaled Monocular SLAM using Learned Scale Factors W. Nicholas Greene and Nicholas Roy ICRA 2020 (Finalist for Best Paper Award in Robot Vision) [ pdf, video ] |
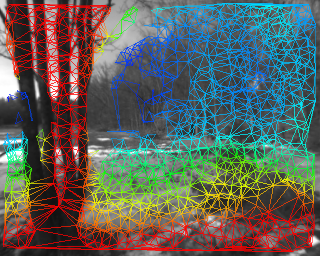 | FLaME: Fast Lightweight Mesh Estimation using Variational Smoothing on Delaunay Graphs W. Nicholas Greene and Nicholas Roy ICCV 2017 [ pdf, video, slides, code ] |
 | Real-Time Dense Simultaneous Localization and Mapping using Monocular Cameras W. Nicholas Greene SM Thesis [ pdf ] |
 | Multi-Level Mapping: Real-time Dense Monocular SLAM W. Nicholas Greene, Kyel Ok, Peter Lommel, and Nicholas Roy ICRA 2016 [ pdf, video, slides, poster ] |
 | Simultaneous Tracking and Rendering: Real-time Monocular Localization for MAVs Kyel Ok, W. Nicholas Greene, and Nicholas Roy ICRA 2016 [ pdf, video ] |